Это один из лучших с полным повторением OSD и управления, Курсо-глиссадная система или КГС, как у реального самолёта. Такие ставятся на хорошие БПЛА, самолёты и крылья, которые действительно жалко разбить.
Сейчас они уже не продаются, это последние в России остатки.
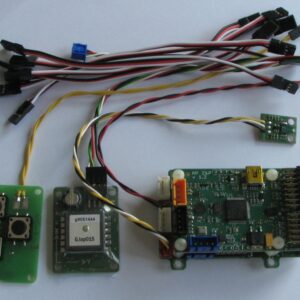
Очень интересный и богатый по возможностям автопилот от Pitlab. Автопилот обладает массой интересных возможностей и настроек. Наличие наземной станции с цветным экраном, большое количество разных модулей, включая модем, кастомизация OSD, высокое качество исполнения железа и софта, наличие русскоязычной инструкции от производителя и хорошая поддержка. Если у вас есть пилот-напарник, эта система позволит отображать на экране радара маркер расположения его самолета относительно вас! Все это позволило автопилоту в кратчайшие сроки приобрести массу поклонников
Особенности:
- Высокое качество изготовления с большим внимание к качеству компонент, каждый комплект проходит проверку производителем
- Полетные режимы: Transparent mode (OFF) – ручное управление, Stabilization mode (STAB) – включена стабилизация полета, Autonomous mode (AUTO) – 100% автономный полет по заданным точкам
- Поддерживаемые типы моделей: Классика Т, элероны на 1 или 2 каналах, летающее крыло, V-tail, любые реверсы.

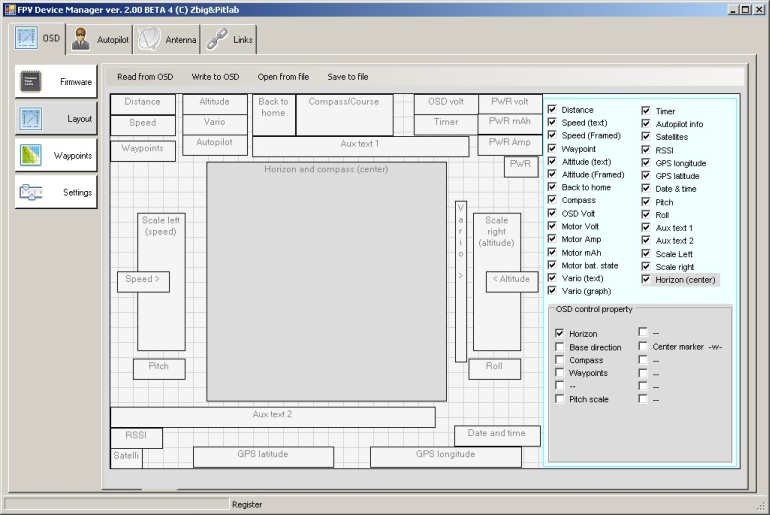
- Информативное OSD с большой гибкостью настроек и встроенной поддержкой русского языка на аппаратном уровне
- Большое количество настроек, отвечающих за поведение самолета с простым и понятным описанием в инструкции
- Стыковка с собственной наземной станцией



- Отличный понятный софт для настройки

- Полная 100% русификация инструкции от производителя
- Хорошая поддержка производителем и быстрое развитие проекта
- 6 входом, 5 выходов
- Поддержка модемов Buddy Flight для режима парных полетов и отображения напарников на OSD
Комплектация:
- Плата Pitlab OSD – 1шт.
- Плата Pitlab Autopilot – 1шт.
Сайт производителя: http://www.pitlab.com/osd.html
Софт: http://www.pitlab.com/fpv-system/download.html
Инструкция на русском языке: http://www.pitlab.com/osd/download/Autopilot_users_manual_ru.pdf
Пошаговая инструкция: http://www.pitlab.com/osd/download/Step_by_step_autopilot_setup_instructions.pdf
В этой записи я постараюсь максимально доступно расписать шаги по установке и настройке замечательного автопилота и OSD – PitLab
по мере наличия времени и возможности я буду по тиху наполнять эту запись.
ссылка на скачивание документации: тык
На данный момент у Питлаба достаточно инструкций, в том числе и на русском языке. Возможно они слегка разобщены и в целом не описывают процесс с ноля, но все необходимые действия в них описаны.
предупреждение: Автопилот не нуждается в калибровке, все необходимые настройки сделаны изготовителем. Процедура калибровки необходима исключительно при видимых нарушениях в работе. (в дальнейшем действия по калибровке будут описаны)
Процесс инсталляции включает в себя:
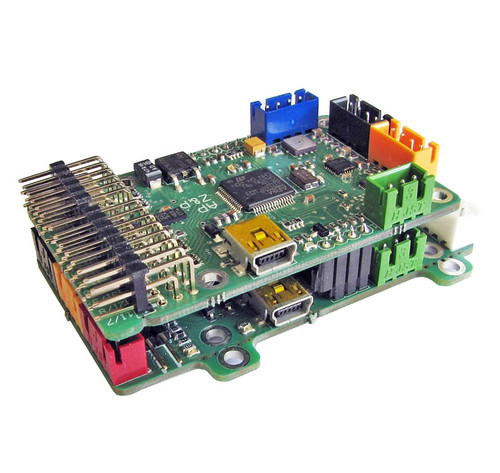
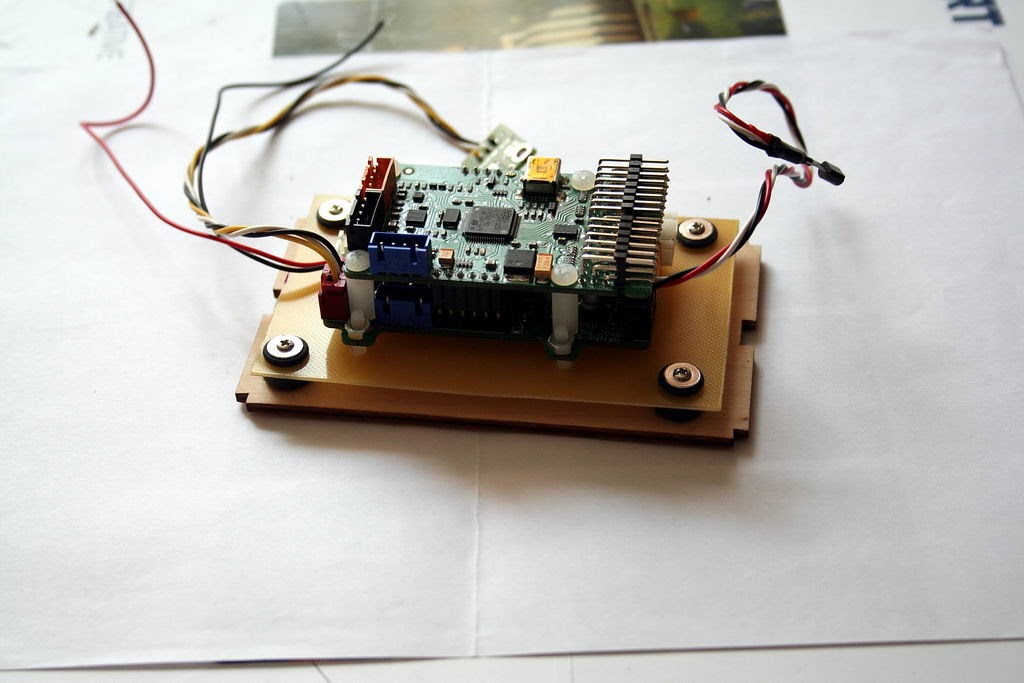
1. установку АП в самолёт
желательна вибро-развязка
АП на экране OSD отображает вибрации, допустимая цифра до 2g! (но лучше вообще не видеть этих цифр), если она больше, следует уделить внимание балансировке винтов и виброразвязке АП.
Кликабельно
2. подключение всех соединений.
ВНИМАНИЕ! Все подключения ПРОВОДОВ к каналам должны производится строго в соответствии с инструкцией! Менять местами провода и делать не по инструкции запрещено!
Обратите внимание!!! Например ПРОВОД управления газом, это всегда ПИН №4 не смотря на настройки в аппе! Это же касается всех остальных каналов!
При использовании Parallel PPM в менеджере ничего менять не нужно, просто втыкайте провода строго в соответствии с инструкцией!
Если вы используете S.bus или CPPM, ВХОДНОЙ провод втыкается в ПИН №1, ВЫХОДНЫЕ строго в соответствии с инструкцией и далее в FPV_manager каналы
можно “переместить” в соответствии с тем как это настроено в аппе.
настройка и подключение V-tail можно посмотреть в “Частых вопросах”
Кликабельно
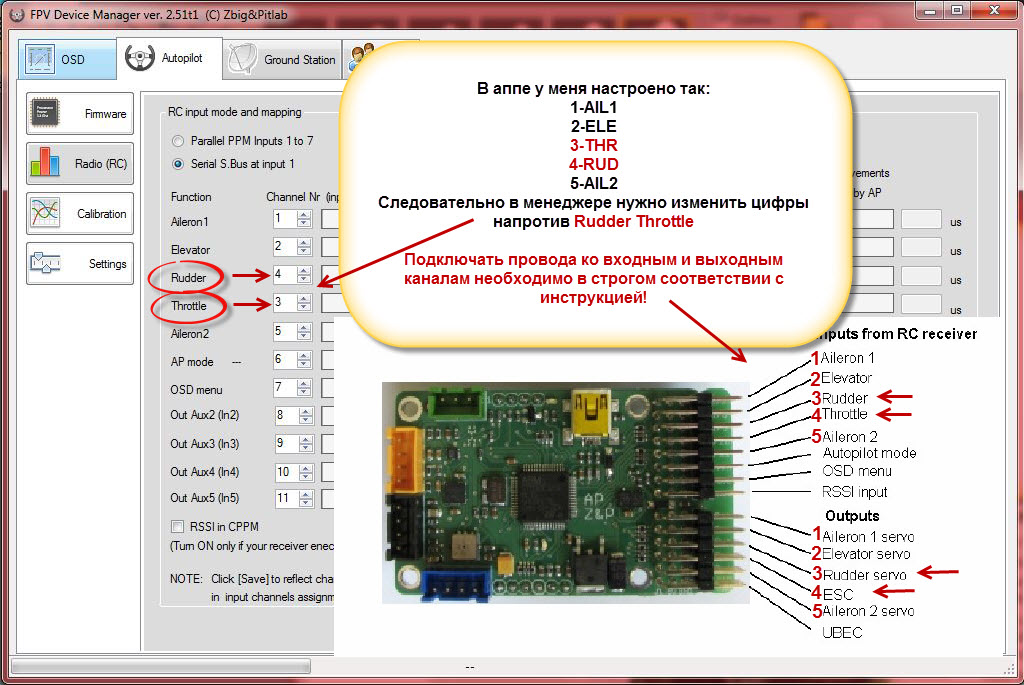
Схема основных соединений
Кликабельно
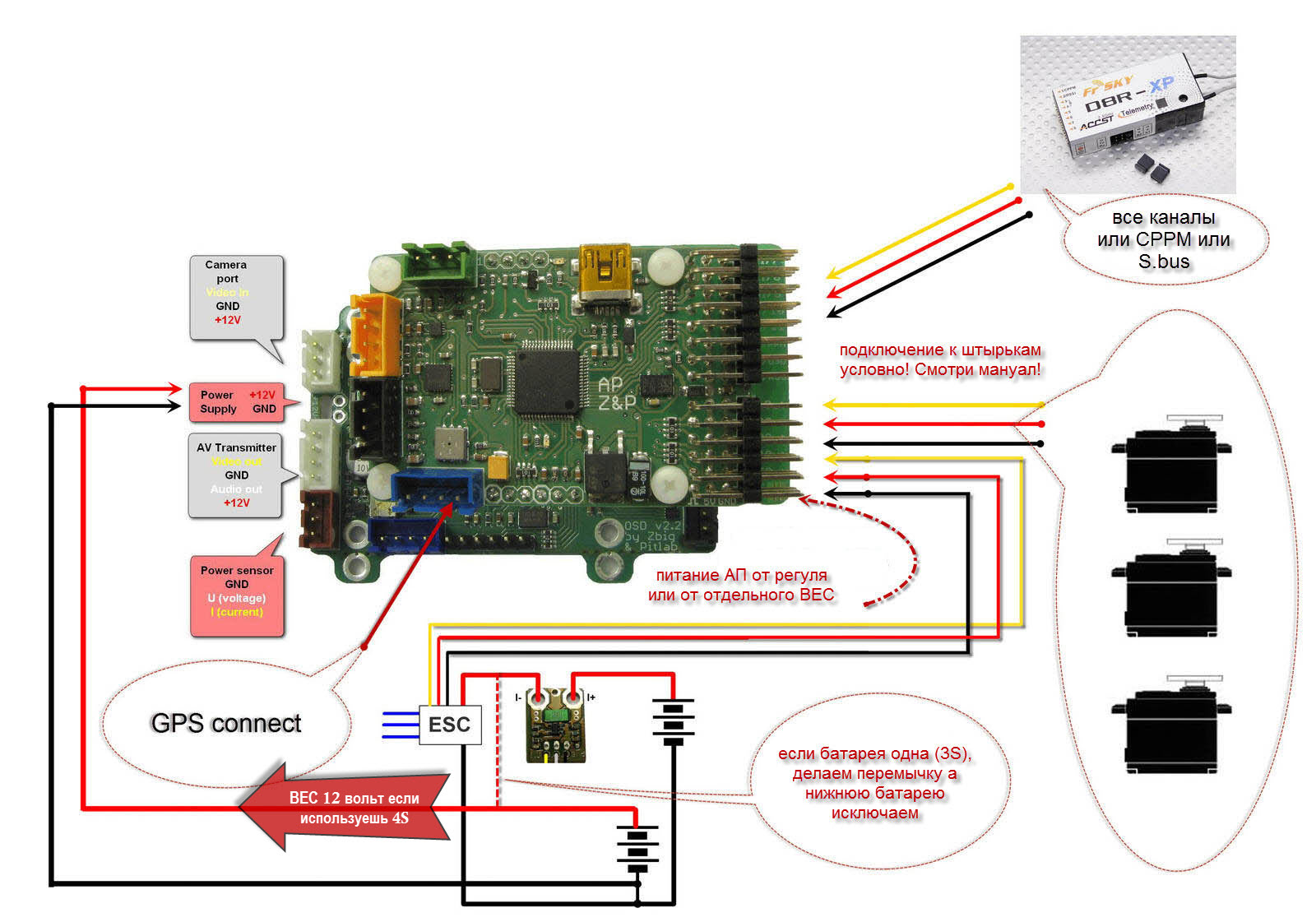
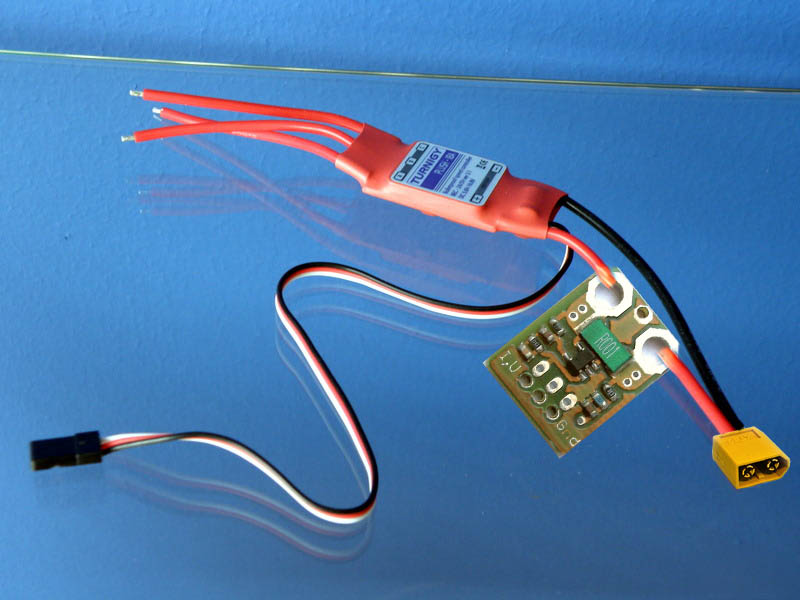
Датчик тока имеет полярность и подключается именно так как на рисунке.
Кликабельно
Датчик температуры и датчик воздушной скорости подключаются к плате OSD, для их подключения придётся разъединить платы, имейте это ввиду заранее.
Если используется датчик воздушной скорости, необходимо помнить:
распиновка датчика не стандартна! Необходима переделка. Датчик подключается только к плате OSD!
Кликабельно

камера и передатчик подключаются прямо к плате OSD (по умолчанию подразумевает питание камеры и передатчика от 12 вольт)
3. полная настройка модели в аппаратуре, этот шаг ОБЯЗАТЕЛЬНЫЙ и выполняется в вашей аппаратуре РУ, со всеми миксами и т.д.
Как это сделать? Читайте инструкцию к своей аппаратуре, это не имеет отношения к Питлабу…

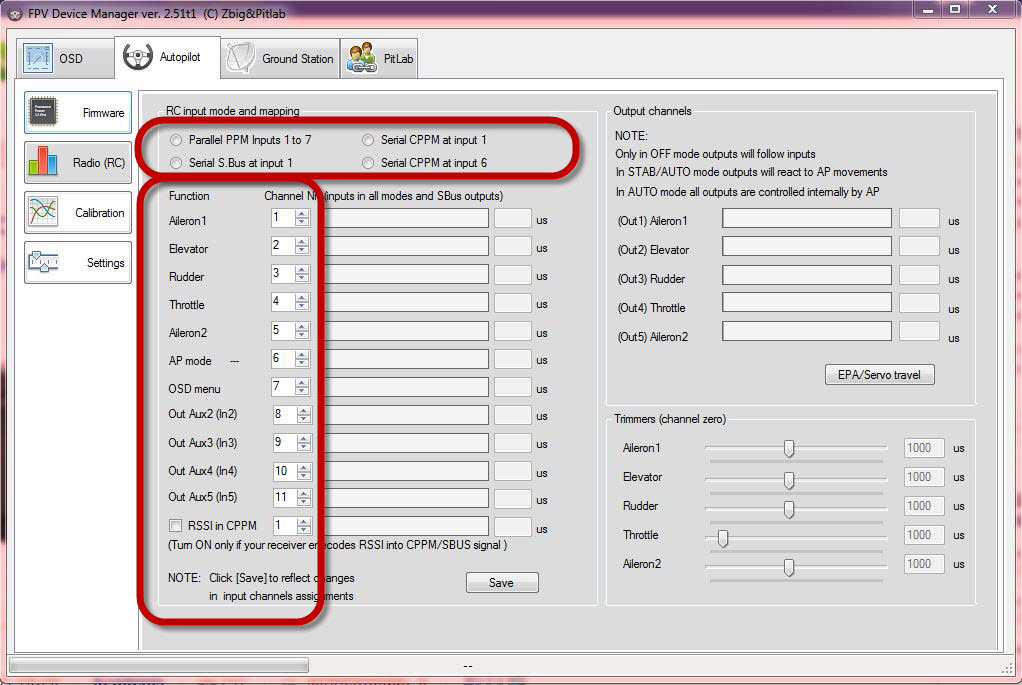
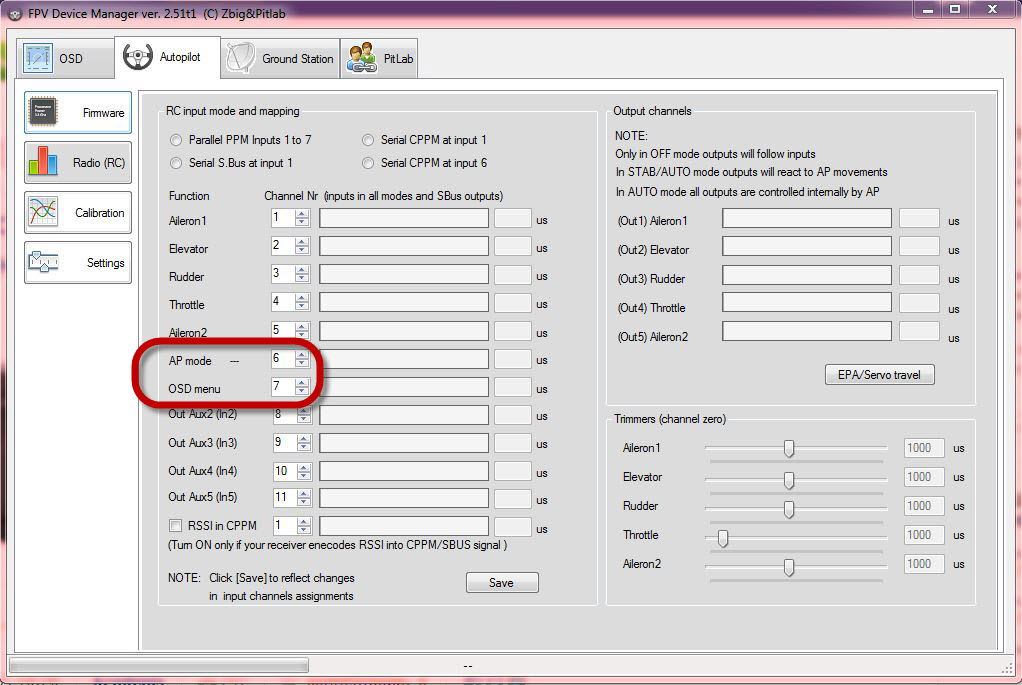
4. настройка типа подаваемого на АП сигнала с приемника(pwm, cppm, sbus) а так же соответствия управляемых каналов (при помощи FPV-manager)
Подключить АП к компу, выбрать нужный входной сигнал, напротив надписей органов управления поправить номера каналов. Нажать Save
Кликабельно
5. настройка каналов управления Автопилотом и ОСД на аппаратуре РУ, указание этих каналов в АП при помощи FPV-manager
Режимы автопилота
Управление режимами автопилота осуществляется с помощью
трехпозиционного переключателя на канале, подключенном в
разъем MODE(или в составе всех каналов по CPPM, S.bus).
Режимы выбираются таким образом:
• Канал на минимуме: (длина импульса PPM меньше чем 1200 мкс): OFF – ручной режим.
• Канал в центральном значении (длина импульса PPM между 1300 и 1700 мкс): STAB – стабилизация.
• Канал на максимуме (импульс длиннее чем 1800 мкс): AUTO – автовозврат в точку старта.
ИНФОРМАЦИЯ
Более того, в режиме автономного полета можно выбрать один из
трех вариантов поведения с помощью ручки газа.
• Газ на минимуме: AUTO – возврат в точку старта.
• Газ в центре: WP – полет по точкам вдоль маршрута.
• Газ на максимуме: (*) – кружение вокруг текущей точки,
используя GPS.
Навигация по меню OSD с радиопередатчика
Можно управлять меню, используя 3-позиционный переключатель на
передатчике РУ, подключенном в разъем OSD menu (или в составе всех каналов по CPPM, S.bus).:
• “Минимальное” значение – PPM импульс меньше чем 1250 мкс
• “Нейтральное” значение – PPM импульс между 1250-1750 мкс
• “Максимальное” значение – PPM импульс больше чем 1750 мкс
Вызов меню – переключатель на «минимальном» значении.
Выбор пункта меню – переход к следующему производится с
помощью перевода переключателя в «нейтральную» позицию и
возврата в «минимальное» значение.
Подтверждение пункта – Когда переключатель на «максимуме» либо
оставлен на «минимуме» на протяжении 5 секунд..
Выход из меню – соответствующим пунктом, либо если оставить
переключатель на «нейтрали» на протяжении 5 секунд, либо при
отсутствии действий на протяжении 5 секундах
Кликабельно
После настройки всех каналов управления можно дополнительно подать питание на АП и проверить все органы управления глядя на экран компьютера,
полоски напротив нужного используемого в данный момент органа управления должны двигаться…
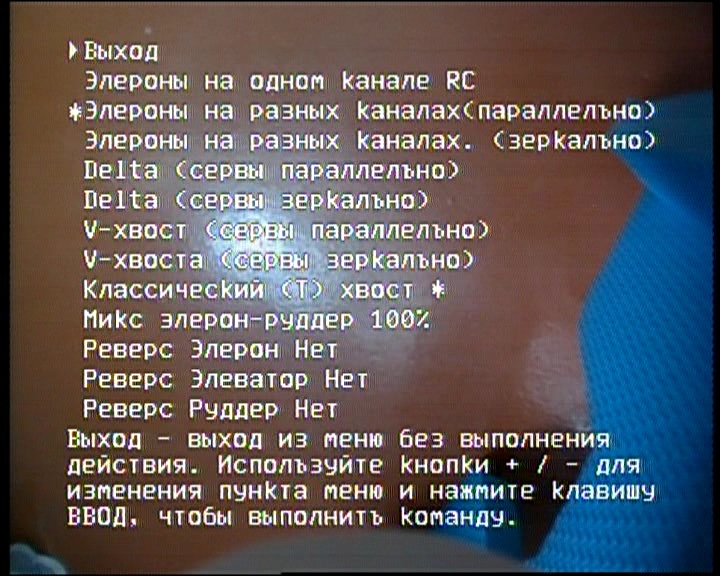
6.Указание автопилоту типа летательного аппарата(классика, крыло, V-tail и т.д. … ) через меню OSD
настраивается прохождением Autopilot->Mixers->Easy Setup(на указанном ниже скрине этот пункт отсутствует, картинка старая)
на каждом шаге нужно удерживать РУЛИ (не стики!) в положении указанном на экране и нажимать ENTER на мини клавиатуре
или настроить вручную указанием типа поверхностей и способа установки серв (закладка Autopilot->Mixers)
Кликабельно
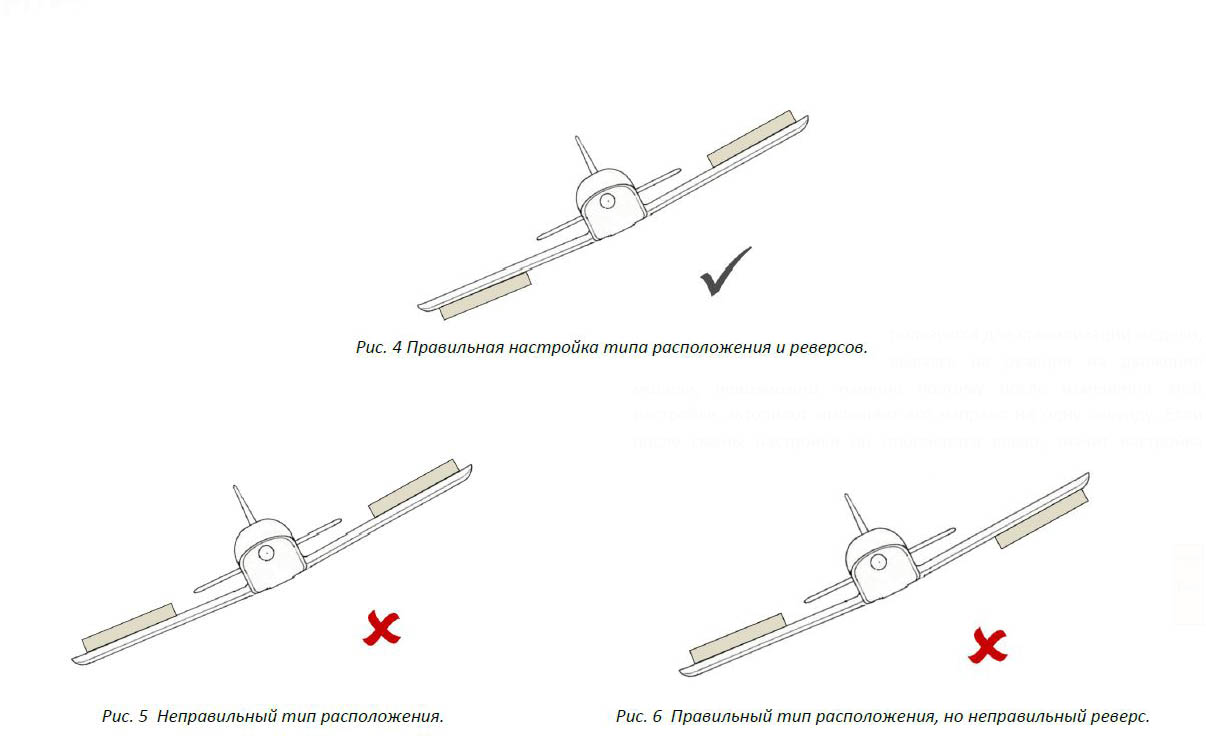
ВНИМАНИЕ! После прохождения EASY SETUP необходимо проверить корректность отклонения рулевых поверхностей в режиме STAB.
Всё поверхности должны корректно отрабатывать перемещение самолёта в пространстве!
Если нос самолёта имеет наклон вниз, руль высоты должен приподниматься, если нос самолёта отклонён вверх, руль наоборот должен отклоняться вниз.
Если правое крыло ниже, элерон на правом крыле отклоняется вниз, на левом вверх… ну и естественно если левое крыло ниже то наоборот…
Проверка рудера при включении питания АП, рудер на секунду отклоняется вправо.
Кликабельно
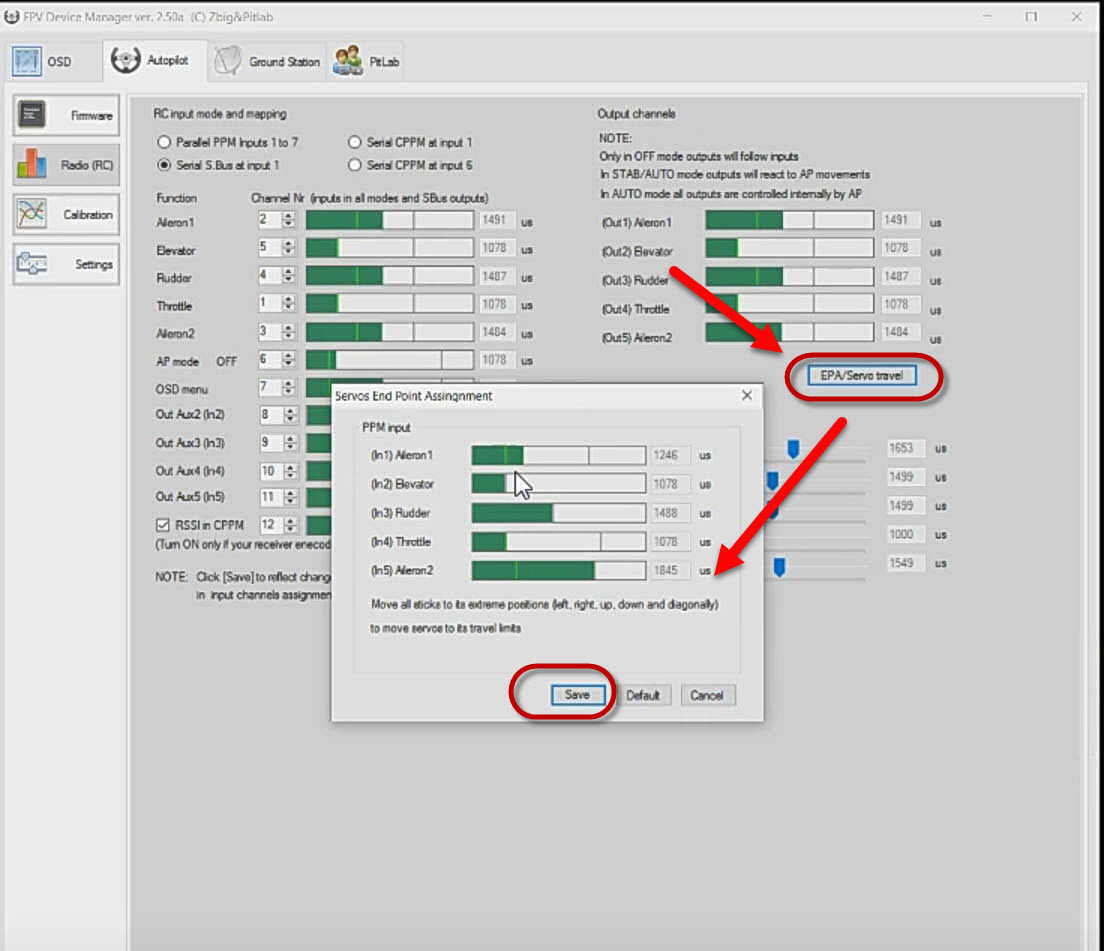
7.установка конечных точек работы сервомеханизмов для АП (при помощи FPV-manager)
Подключить АП к компьютеру, включить РУ, подключить питание автопилота.
Выставить 100% расходы на аппаратуре!!! Это важно!
В режиме “OFF” войти в меню EPA, подёргать стиками во всех направлениях, в том числе и по диагоналям,
АП запомнит конечные точки для работы в режиме AUTO, нажать Save
Кликабельно
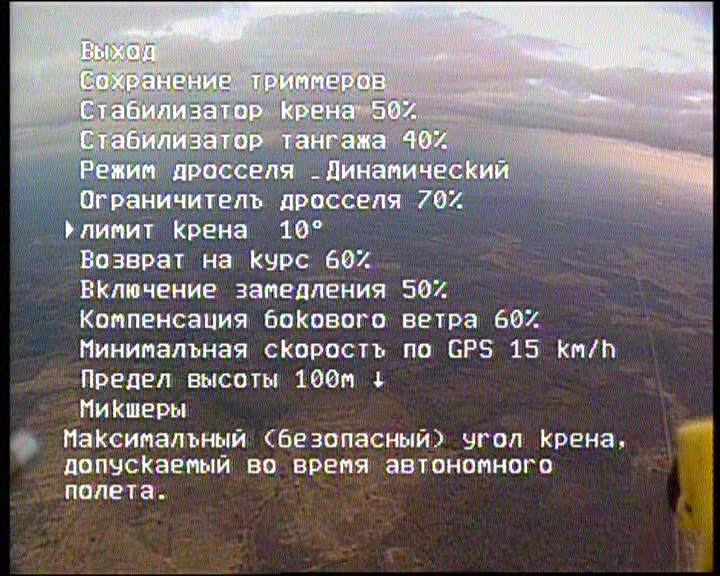
8.настройка основных параметров полёта через меню ОСД (углы кренов, тип управления газом и т.д. …)
для начала эти параметры как правило остаются по умолчанию и уже позже после тестовых полётов редактируются под ваши нужды…
Кликабельно
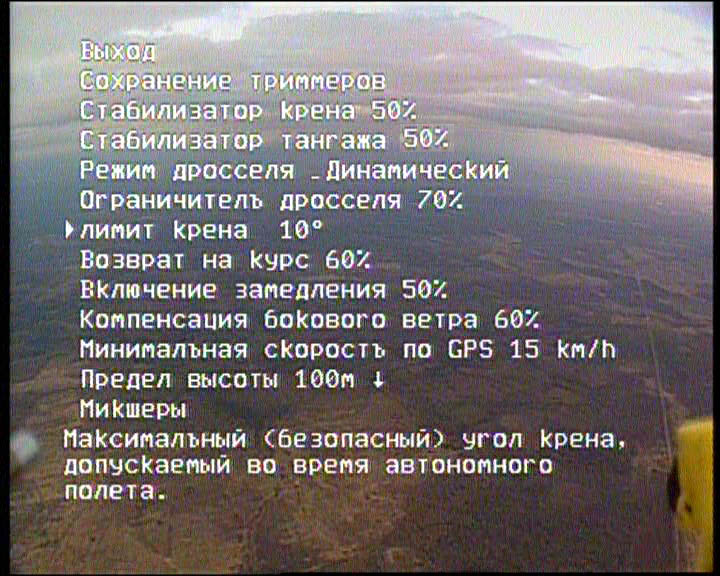
настройки на скрине показаны для примера и не являются обязательными!
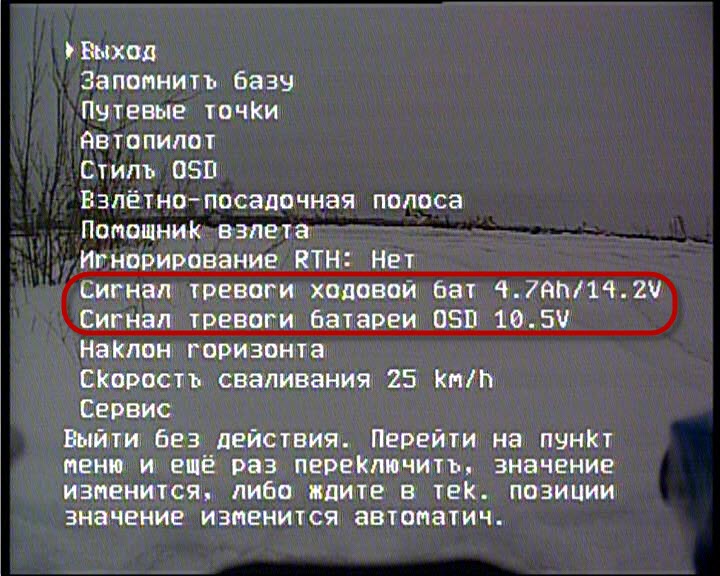
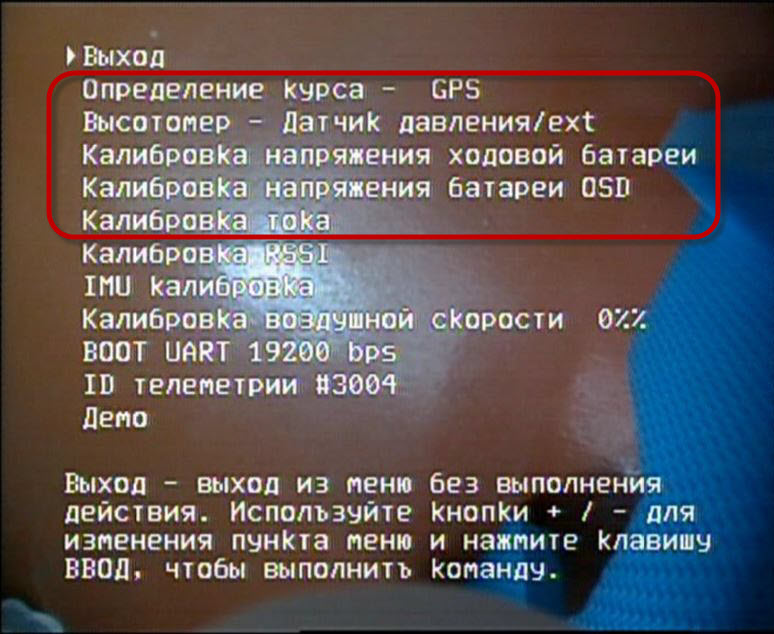
9.настройка основных параметров ОСД, таких как количество банок батареи, калибровка напряжений ходовой и видео батареи,
калибровка тока ходовой батареи, сигналы тревоги ходовой и видео батареи, определение курса и высоты…
Выполняется через меню основное меню OSD, а так же закладка – Сервис
Определение курса – ОБЯЗАТЕЛЬНО установите “по GPS”, высотомер рекомендую установить по датчику давления.
Кликабельно
Кликабельно
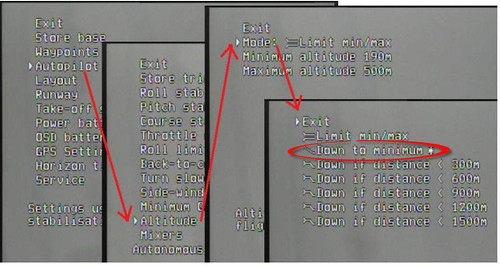
10. настройка типа АВТОВОЗВРАТА и режимов управления газом
Производится через меню OSD
Для начала я рекомендую установить режим дросселя – “Динамический” 80% (самый экономичный) и тип возврата Down to minimum
Автопилот Питлаб не имеет параметра настройки скорости возврата, скорость зависит от режима управления газом
и выбранного режима(типа) возврата.
“Режимы управления газом”
Автопилот имеет три режима управления газом, позволяющих
подогнать его поведение под конкретные нужды.
Динамический режим
рекомендуется для большинства моделей.
В этом режиме газ удерживается на том уровне, на котором
модель летит на постоянной высоте, в пределах лимита газа.
Это позволяет выполнять экономичный полет.
Режим постоянного газа
В этом режиме газ удерживается на уровне,
заданном лимитом газа. Этот режим применяется для скоростных моделей
с тенденцией к сваливанию, в сильный ветер, а так же в том случае,
когда необходим быстрый полет.
Режим вкл-выкл
Этот режим создан для моделей планеров. В данном режиме
мотор включается на уровень, заданный лимитом газа,
и выключается по увеличению высоты на 50-70 метров, после чего
модель планирует. По потере такого же количества высоты процесс повторяется.
“Режимы работы (типы) автовозврата”
Режим Down if distance less than…
В этом режиме, независимо от текущей высоты, автопилот изменит высоту, чтобы достичь заданной максимальной высоты, а затем будет лететь по направлению к базе на этой высоте над уровнем моря.
Когда расстояние до базы станет меньше, чем заданное а настройках, автопилот будет лететь вниз к выбранной минимальной высоте и далее по прямой линии до базы.
Это позволяет избежать очень высоких препятствий, таких как линии электропередач, заводских труб и холмов при полете обратно домой.
Режим Down to minimum:
В этом режиме автопилот летит домой контролируя высоту таким образом, чтобы достичь минимальной высоты в точке базы. С точки зрения потребления батареи, это, вероятно, самый экономичный способ полета обратно домой.
Когда выбрана эта опция, если самолет находится ниже установленной минимальной высоты, автопилот будет немедленно увеличить высоту самолета до минимума, а затем сохранит эту высоту во время полета в направлении базы.
Если самолет находится выше заданной минимальной высоты, автопилот будет уменьшать высоту пропорционально расстоянию до базы, чтобы достичь минимальной высоты по прибытию на базу.
Автопилот фактически летит по наклонной прямой от текущей высоты до точки “минимальная высота” над базой. Это может происходить с выключенным двигателем если самолёт хорошо планирует…
Режим Limit min/max:
В этом режиме автопилот держит самолет в заданных пределах высоты минимальная и максимальная.
Если самолет находится ниже минимальной высоты при RTH автопилот увеличит высоту самолета, пока самолет не достигнет указанного минимума, а затем сохранит эту высоту во время полета в направлении базы.
Такое поведение используется, чтобы избежать препятствий, таких как деревья или здания на пути домой.
Если самолет находится выше указанной максимальной высоты, автопилот будет немедленно уменьшать высоту, пока самолет не достигнет максимальной высоты, а затем продолжит полет к базе на этой высоте.
Если самолет находится между минимальной и максимальной высотой, при включении RTH автопилот будет держать самолет на текущей высоте.
Кликабельно, режим дросселя
Кликабельно, тип возврата
Внимание! Настоятельно рекомендую вывести на экран ОБЕ СТРОКИ отображения режимов автопилота! Смотри картинку ниже.
Эта опция позволит более правильно понимать, что делает АП в тот или иной момент времени.
Для начала можно использовать для экрана OSD темплейт “F16” или “F16 small font” (смотри в программе FPV_manager)
Запуск
После включения питания дождаться наличия спутников, смотри OSD. Обычно этот процесс занимает не более 20-30 секунд, обычно это 10-13 спутников.
после этого обратить внимание на удаление от базы. Как правило система достаточно быстро и точно определяет ваше положение, с погрешностью 2-3 метра,
Кликабельно

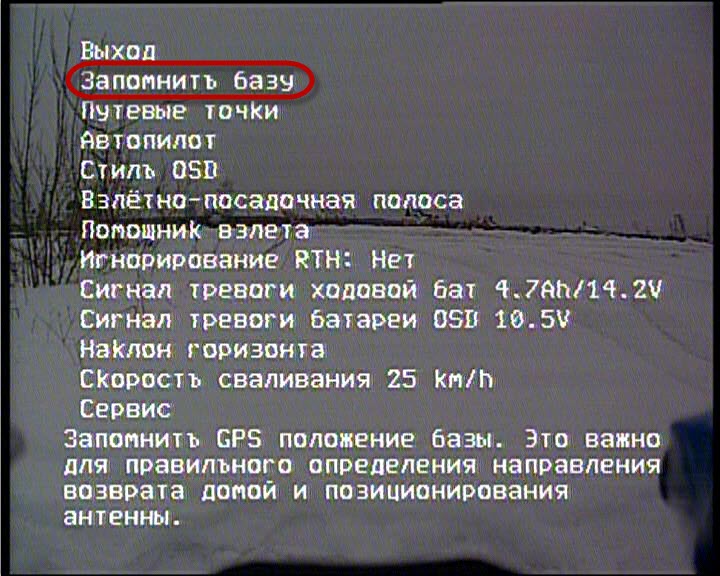
но я взял для себя за правило, после включения питания и нахождения спутников провести процедуру запоминания базы. (операция не обязательная)
Кликабельно
после этого расстояние до базы должно стать “ноль”, проверяем напряжение ходовой и видео (скрин выше), если всё в норме, запускаем!
Обязательные условия первого запуска:
ВНИМАНИЕ! это очень важно, на этом основан принцип работы системы Питлаб.
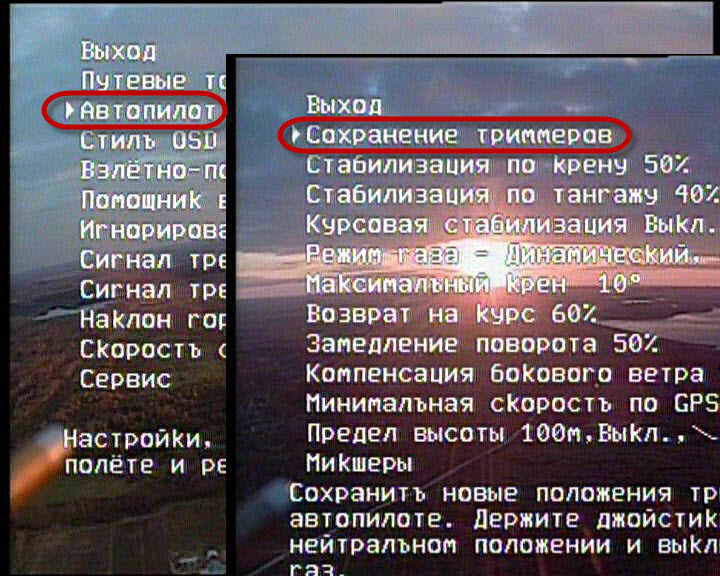
Запустить модель в РУЧНОМ режиме, оттримировать на ровный устойчивый полёт,
а так же уверенный набор высоты полёта при уровне газа процентов от 70-80 и выше…
Это КЛЮЧЕВОЙ момент для нормальной работы АП
Далее необходимо установить минимальный уровень газа при котором модель летит ровно в горизонте не теряя высоты
и не изменяет направления (самый экономичный режим полёта в горизонте),
зайти в меню OSD и выполнить операцию сохранения тримеров.
Кликабельно
После этого можно включить режим “Stab”, направление полёта и высота не должны измениться… По управлению модель станет мягкой, вялой… При отпускании стиков должна возвращаться в ровный полёт (не забываем про газ)
После этого можно слегка удалив модель от базы и набрав немного высоты попробовать режим “AUTO”, будьте готовы всегда перехватить модель снова в режим “Stab”, так как на дефолтных настройках модель может вести себя плохо…
Далее следует тюнинг основных полётных настроек через меню OSD (углы наклона, параметры стабилизации и т.д.)
Вот как то так… Подробнее все эти шаги можно найти в инструкциях, что непонятно спрашиваете, всегда помогу.
Полётные режимы
в Pitlab & Zbig FPV System
Содержимое
Содержимое 1
Обзор 1
Режим стабилизации 3
RTH Возврат домой 4
Управление высотой в RTH 5
Взлёт 6
Кружение над точкой GPS 7
Автоудержание курса и высоты 7
Ручной полёт по точкам 8
Автономный полёт по точкам 9
RTR – возврат на ВПП 9
Ручная посадка с КГС(ILS) 10
Автоматическая посадка с КГС(ILS) 11
Маршрут 11
Резюме по полётным режимам 12
Обзор
Фраза “Полётный режим” или просто Режим, используемая в Pitlab & Zbig FPV System
означает особый режим поведения автопилота и сопутствующей информации отображаемой на
экране OSD для сопровождения этого режима. Автопилот позволяет ручное, вспомогательное
или полностью автоматическое управление полётом в определённое место или по маршруту.
Информация, отображаемая на OSD, включает направление курса, дистанцию, высоту. Они
могут быть как относительными к производной GPS точке, например база(дом), точке
навигации или временной цели или путевой точкой. В течении полёта пилот может изменить
точки навигации и система будет предоставлять сопровождения к следующей выбранной точке,
в ручном или автоматическом режиме.
Типы точек навигации, используемые в системе:
● Base – Стартовая точка (домашняя позиция, база)
● RW – Текущая выбранная ВПП при ручном полёте
● Land – Начало подхода к пути и ВПП при автономной посадке.
● WP – Путевые точки
● (*) – Точка, над которой выполняется кружение
● Route – Путь полёта по точкам маршрута
● HOLD – Временная виртуальная точка на 5km вперёд в режиме автономного удержания
курса и высоты
Точки навигации могут быть выбраны несколькими способами, руками или автоматически:
● Используя переключатель режимов автопилота на пульте
● В режиме AUTO с помощью стика газа
● Используя меню OSD (используя переключатель управления OSD на передатчике)
● Меняя вид ОСД из меню (используя переключатель экранов OSD на передатчике)
● При срабатывании FailSafe на приёмнике (потеря сигнала радиоуправления или выход
за зону приёма сигнала)
Автопилот имеет 4 режима работы:
● OFF – полностью ручной полёт, когда пилот управляется самолётом, будто автопилота
нет. Все команды попадают напрямую с приёмника на управляющие поверхности и газ.
● STAB – ручной режим стабилизации, где автопилот помогает пилоту облегчить
управление положением самолёта, избегая неожиданных движений, вызванных
турбулентностью и ветром.
● TAKE – подрежим режима STAB с дополнительной поддержкой набора высоты для
быстрых, контролируемых взлётов..
● AUTO – автономный полёт, где автопилот принимает полное управление самолётом.
Он имеет много подрежимов, каждый с разным поведением автопилота.
В PitLab system, точка навигации определяет куда вы хотите лететь, а режим автопилота
определяет как вы хотите туда лететь.
Комбинация всех точек навигации вместе с режимами автопилота имеет много состояний и
разное поведения системы, которые объединены в таблице ниже:
Экран ОСД Поведение полёта
Auto, (*) Автопилот в режиме AUTO кружится над данной GPS точкой
Auto, Hold Автопилот выполняет автоматическое удержание высоты и курса
(на 5 км)
Auto, Wp X Автопилот контролирует полёт к Путевым точкам
Auto, Route Автопилот контролирует полёт по Маршруту
Auto, Base Автопилот контролирует Auto RTH – Возврат домой (базу или
точку старта)
Auto, RWxxx Автопилот контролирует полёт к ВПП(RTR) – Возврат на полосу
Auto, Land Автопилот контролирует авто Посадку
Stab/Off
RWxxx
ОСД отображает информацию для ручной или КГС(ILS) посадки
Stab/Off, Base ОСД отображает информацию для полёта к Base в ручном режиме
или со стабилизацией
Stab/Off, Wp
X
ОСД отображает информацию для ручного или стабилизированного
полёта к Путевой точке
Stab/Off,
Route
OSD отображает информацию для ручного или стабилизированного
полёта по Маршруту
Stab, TAKE Автопилот предоставляет помощь для стабилизированного Авто
взлёта
Дополнительно, некоторые AUTO режимы могут иметь несколько разных фаз в течении полёта
(например в режиме авто посадки автопилот сначала летит к началу подхода на заданной
высоте, затем следует по глиссаде, затем отключает мотор на низкой высоте и, в конце,
садится).
Замечание: AUTO (автономный полёт) и Stab (Стабилизированный) режимы доступны
только, когда OSD и Автопилот используются одновременно (полный набор PitLab).
Figure 1 – Упрошённый экран ОСД с относящимися к навигации полями
Все данные, отображаемые на экране OSD, указываются относительно самолёта, а не базы.
Графика OSD отображается относительно пилота в самолёте (как в обычных полноразмерных
самолётах), не относительно позиции пилота, который сидит на земле. Это значит, к примеру,
что индикатор курса показывает, где находится позиция базы относительно к текущему курсу и
позиции самолёта, не от позиции, где находится FPV пилот на земле. Это же применимо и к
позиции путевой точки или информации КГС(ILS). Во-первых, это может выглядеть странным,
но в реальности это наиболее натуральный подход.. После нескольких полётов всё становится
привычным и FPV пилот начинает чувствовать, будто сам сидит в самолёте, а не на земле.
При настройке экранов OSD в FPV Device Manager режим автопилота отображается в поле
“Autopilot info”, а отображаемый режим навигации в поле “Navigation mode”.
Навигация к базовой точке(база, дом)
Навигация к текущей базовой точке является режимом навигации по-умолчанию после
включения во всех ручных режимах(OFF/STAB and TAKE) и в автономном режиме RTH. В
этом режиме OSD отображает расстояние и курс на базу. Режим базовой точки позволяет легко
распознать актуальную позицию, относительно к местоположению FPV пилота и легко
вернуться на стартовую точку. Базовая позиция автоматически устанавливается при получении
корректных GPS координат при включении или выполнении команды “Сохранить базу” из
меню OSD.
RTH – возврат домой
В режиме RTH автопилот автоматически полетит назад к базовой(домашей) точке. В этом
режиме OSD показывает расстояние и курс к текущей определённой базе. Этот режим
позволяет автономно и безопасно вернуться к стартовой точке, если связь с радиоаппаратурой
будет потеряна. Пилот также может вызвать RTH напрямую с помощью включения режима
AUTO/RTH.
Чтобы включить режим AUTO RTH(автономный полёт к базовой точке):
● Установите режим автопилота в AUTO (используя переключатель режимов автопилота
на радио аппаратуре).
● Переведите стик газа в минимальную позицию(PPM пульс ниже 1250 микросекунд или
меньше ¼).
Figure 3 – ОСД экран при навигации к базовой точке в автономном (RTH) полёте
Автопилот включает режим RTH автоматически, когда пропадает сигнал с приёмника
радиоуправления. В этом случае поле “Autopilot mode” на OSD будет моргать и показывать
сообщения Auto и –RC.
Figure 4 – OSD отображает в поле Autopilot mode сообщения RC failure или signal loss
Режим RTH так же может быть включен, когда RC приёмник находится вне зоны доступа или
передатчик перестаёт слать корректный сигнал (например, если сломался пульт или села
батарейка). Использование этой возможности требует, чтобы на приёмнике был настроен
Failsafe. Тогда, когда он сработает, он заставит каналы приёмника выставить режим Auto и
перевести стик газа вниз.
Замечание: Чтобы избежать неожиданного поведения в случае потери сигнала с радио
аппаратуры, канал переключения OSD должен быть выставлен в нейтральное положение
при активации FS. Значения других каналов не играют роли для автопилота, однако
пилот должен корректно настроить и другие каналы для корректной работы закрылок,
посадочного шасси, хедтрекера, в зависимости от индивидуальных настроек.
Замечание: Если вы используете LRS релей с двумя наборами передатчиков и приёмников это
КРИТИЧНО настроить FS на обоих приёмниках. Это принято у пилотов, летающих на дальние
расстояния, использовать свой радиопередатчик для передачи сигнала на короткое расстояние
(1 на рисунке 5) на высокую мачту. Здесь обычный приёмник подключен проводами к LRS
передатчику и команды управления с пульта пересылаются на LRS приёмник на самолёте (2 на
рис. 5). Когда используется такой тип управления, для максимальной безопасности в случае
проблем с RC, оба приёмника (1) и (2) ДОЛЖНЫ иметь правильно настроенный FS.
Figure 5 –радиоуправление с использованием LRS релея
Обратитесь к инструкции вашей радиоаппаратуры и LRS для настройки FS.
Режимы управления высотой при RTH
В режиме Auto/RTH автопилот не только удерживает самолёт на курсе к базе, но также
удерживает высоту с помощью газа и тангажа. Высота при AUTO/RTH устанавливается на базе
настроек, сделанных в подменю OSD->Autopilot->Altitude. Здесь есть 3 типа опций для
определения поведения автопилота при удержании высоты в RTH.
Figure 6 – Структура меню настроек удержания высоты при RTH
Режим удержания высоты Limit min/max: в этом режиме автопилот удерживает самолёт в
пределах указанных лимитов Minimum и Maximum. Если самолёт находится ниже
минимальной высоты при срабатывании RTH, автопилот увеличит высоту самолёт, пока он не
достигнет указанной минимальной высоты, после чего продолжит полёт к базовой точке. Этот
режим используется для избежания препятствий, таких как деревья или строения по пути
следования домой. Если самолёт находится выше указанной Максимальной высоты,
автопилот незамедлительно снизится, пока не достигнет Максимальной высоты и затем
продолжит полёт к базе не этой высоте. При полёте на максимальной высоте вероятность
восстановления утерянного сигнала управления выше из-за прямой видимости. Также, самолёт
станет виден раньше при полёте на большей высоте, чем на меньшей. Если в момент
срабатывания RTH самолёт будет находиться в пределах Минимальной и максимальной
высоты, то он продолжит полёт на текущей высоте в течении всего полёта на базу.
Режим удержания высоты Down to minimum: В этом режиме автопилот летит домой,
управляя высотой так, чтобы в оказаться на базе на указанной высоте. Касательно потребления
батареи, это наиболее экономичный путь возврата домой. Когда эта опция выбрана, если
автопилот находится ниже указанной высоты, автопилот немедленно увеличит высоту до
минимальной и затем будет удерживать её при полёте к базе. Если самолёт находится выше
указанной минимальной высоты, автопилот будет уменьшать высоту пропорционально
расстоянию к базе для достижения минимальной высоты, когда самолёт прилетит на базу. Это
выглядит как полёт по прямой линии с текущей высоты в точку “Минимальной высоты”,
находящуюся над базой. Иногда, это может привести к полному отключению газа и
планированию.
Режим удержания высоты Down if distance less than… : В этом режиме, не смотря на текущую
высоту, автопилот изменит высоту для достижения указанной максимальной высоты и затем
полетит к базе на максимальной высоте. Когда дистанция к базе станет меньше, чем указанная
дистанция, автопилот снизится до указанной минимальной высоты так же, как и в режиме
Down to minimum, т.е. по прямой линии. Этот режим позволяет избежать очень высоких
препятствий, таких как высоковольтные линии, фабричные трубы, горы при полёте домой.
Figure 7 – Auto RTH полёт в режиме “Down if distance”
Во всех режимах RTH, после достижения базовой точки автопилот будет выполнять восьмёрку
с базой в центре. Автопилот будет предпринимать попытки попасть в центральную точку на
требуемой высоте, затем выполнит поворот в каждый раз в другую сторону.
Радиус каждого поворота зависит от настроек автопилота, характеристик самолёта, скорости
ветра и его направления.
Замечание: Точка назначения по-умолчанию для автономного полёта (включая условия
failsafe) может быть изменена с базы на выбранную ВПП в режимах КСГ(ILS)/RTR
(Возврат на полосу) и LAND (автоматическая посадка).
Взлёт(Takeoff)
Взлёт – это модификация режима STAB и он не связан с режимами навигации; он может быть
связан с режимами Base, Waypoint или Route. В этом режиме автопилот управляет скоростью
набора высоты и углом, стабилизируя самолёт для избежания непредвиденных изменений в
положении и курсе, но всё же позволяет пилоту ручное управление самолётом в любой момент.
Этот режим должен быть активирован перед взлётом, когда самолёт всё ещё на земле. Для
полного описания режима Взлёта обратитесь к документу “Takeoff Support in Pitlab FPV
System”, доступному в формате PDF на сайте Pitlab.
Для активации режима Взлёта:
● измените режим автопилота в режим STAB (используя переключатель режимов
автопилота на радио аппаратуре)
● Используйте переключатель управления OSD для выбора команды Takeoff
support->Activate takeoff now из меню OSD.
Figure 8 – Режим взлёта
Для того, чтобы установить режим взлёта по-умолчанию при включении автопилота, выберите
в меню OSD опцию Takeoff support->Takeoff on startup: to Yes.
Кружение над точкой GPS(CIRCLE)
При активации этого режима текущая точка самолёта будет сохранена во временную память и
самолёт начнёт кружить над ней с радиусом в 100 метров. В этом режиме отображаемая на
OSD информация о курсе и дистанции будет относиться к сохранённой GPS точке. Автопилот
удерживает как-минимум текущую высоту,но самолёт может подниматься из-за настроек газа
или сильных восходящих потоков, автопилот позволяет самолёту увеличивать высоту. Это
может применяться для планирования и набора высоту в восходящих потоках, пока ветер не
сдвинет восходящие потоки в другом место.
В режиме кружения есть возможность изменения радиуса. Отклонение стика руддера более,
чем на 50%, будет изменять радиус кружения. Доступно 10 шагов радиуса кружения: 50m, 70м,
100м, 150м, 200м, 300м, 400м, 500м, 700м и 1000м. Каждое отклонение стика вправо будет
однократно увеличивать радиус. Каждое отклонение стика вправо будет его уменьшать.
Во время изменения радиуса в поле значения полётного режима (*), вместо эмблемы полётного
режима, появится целевой радиус.
Внимание: Радиус поворота не сохраняется между включениями автопилота. Значение
по-умолчанию для радиуса кружения 100м. Установленная величина кружения
применяется для: режима кружения(*), возврата на базу RTR/RTH, в режиме удержания
высоты “Mountain mode”, и кружения при заходе на посадку перед началом подхода к ВПП.
Для активации режима кружения:
● Измените режим автопилота в режим AUTO (используя переключатель режимов
автопилота на радио аппаратуре).
● Переведите стик газа в максимальное положение (PPM пульс выше 1750 микросекунд
или больше ¾ стика газа).
В режиме кружения пилот может изменять направление кружения с помощью стика крена
полностью влево или вправо, пока направление не будет изменено. При изменении
направления кружения место GPS точки не будет изменено.
Автоматическое удержание высоты и курса
Режим HOLD используется для полёта по прямому курсе на текущей высоте. По соображениям
безопасности, после 5 километров автономного полёта автопилот начнёт кружиться над GPS
точкой, удерживая текущую высоту.
В режиме HOLD есть возможность изменять высоту и курс самолёта с помощью стиков
тангажа и крена.
Перемещение стика тангажа более, чем на 30% от среднего положения заставит автопилот
соответственно увеличить или уменьшить высоту. Скорость изменения высоты
пропорциональна отклонению стика. Во время изменения высоты, вместо надписи режима
HOLD появится целевая высота, которую автопилот должен будет достигнуть.
Перемещение стика крена более, чем на 30% от среднего положения, вызовет изменения курса
в сторону отклонения. Скорость изменения курса пропорциональна величине отклонения стика.
Во время изменения курса, вместо надписи режима HOLD появится целевой курс, который
автопилот должен достигнуть.
Для активации режима AUTO HOLD:
● Измените режим автопилота в режим AUTO (используя переключатель режимов
автопилота на радио аппаратуре).
● Переведите стик газа в среднее положение (PPM пульс между 1250 и 1750
микросекундами или между ¼ и ¾ стика газа).
● Если ранее был выбран режим навигации по базовым точкам, он должен быть
отключен и выставлен снова режим HOLD Waypoints->Auto/Mid: Hold course &
altitude).
Замечание: После включения путевые точки не активны и установлено поведение
по-умолчанию для удержания высоты и курса.
Figure 10 – OSD информация в режиме удержания высоты и курса
В режиме Auto HOLD удерживает текущую высоту, пока текущая высота меньше, чем
настроенная минимальная высота для автономного полёта (установлена в OSD меню
Autopilot->Altitude->Minimum Altitude). В этом случае, автопилот увеличит высоту до
минимальной и будет удерживать эту высоту в течении полёта.
В режиме Auto HOLD автопилот предпринимает попытку удерживать курс самолёта (прямой
путь следования над землей), не направление самолёта. В случае сильного бокового ветра,
направление самолёта может изменяться для компенсации сноса, вызванного ветром. Это
поведение известно как “краббинг”.
Ручная навигация по путевым точкам
В этом режиме OSD будет вести пилота к путевой точке, отображая расстояние и курс к этой
точке. Когда самолёт приблизится ближе 60 метров к путевой точке, текущая путевая точка
будет изменена на следующую и навигация продолжится к следующей точке. Когда последняя
путевая точка будет достигнута, дисплей навигации останется на этой точке.
Для активации ручного полёта по точкам:
● Выбрать путевую точку в меню OSD Waypoints->(выбранная путевая точка)->Start
flying from this waypoint.
● Выбрать режим автопилота STAB или OFF (используя переключатель режимов
автопилота на радио аппаратуре).
Figure 11 – Режим ручной навигации по путевым точкам
Для отключения режима навигации по путевым точкам, выполните меню OSD опцию
Waypoints->Auto/Mid:. После этого эта опция изменится с Auto/Mid: Fly through waypoints
(текущий режим) на Auto/Mid: Hold course & altitude (режим по-умолчанию при включении).
Автономная навигация по путевым точкам
В этом режиме автопилот будет вести самолёт к выбранной путевой точке. Когда самолёт
пролетит ближе 60 метров к путевой точке, текущая путевая точка будет изменена на
следующую и навигация продолжится к следующей точке. Когда последняя путевая точка
будет достигнута, автопилот начнёт кружить над GPS координатой последней точки.
Для активации автономного полёта по путевым точкам:
● Выберите путевую точку из OSD меню Waypoints->(selected waypoint)->Start flying
from this waypoint.
● Измените режим автопилота в режим AUTO (используя переключатель режимов
автопилота на радио аппаратуре).
● Переведите стик газа в среднее положение (PPM пульс между 1250 и 1750
микросекундами или между ¼ и ¾ стика газа).
Figure 12 – Автономный полёт по путевым точкам
Для отключения режима навигации по путевым точкам, выполните меню OSD опцию
Waypoints->Auto/Mid:. После этого эта опция изменится с Auto/Mid: Fly through waypoints
(текущий режим) на Auto/Mid: Hold course & altitude (режим по-умолчанию при включении).
Если вы измените положение стика газа, режим будет изменён на кружение или RTH/RTR
соответственно.
В этом режиме переключение режима из AUTO в STAB/OFF изменит режим полёта с
автономного на ручной полёт по путевым точкам.
RTR – Возврат на ВПП
Этот режим похож на RTH (Возврат домой), но вместо возврата на стартовую точку(базу),
автопилот будет вести самолёт на выбранную ВПП, и затем кружить над точкой касания,
определённой для этой полосы. Автопилот не приземлится автоматически, но будет
удерживать высоту над этой точкой пока FPV пилот не примет управление самолётом или не
сядет батарея и самолёт не спланирует рядом рядом с ВПП. Этот режим полезен в аварийном
случае, когда база(стартовая точка) не подходит для аварийной посадки, а ВПП подходит. Так
же это может быть использовано при проблемах при дальнем полёте. В этой ситуации пилот
может определить новую ВПП на лету используя ОСД меню Runways->(selected runway)->Use
current GPS position, выбрать её для RTR и затем выключить передатчик, собрать все
вещиpack и поехать к этой GPS точке (с надеждой) поднять самолёт с земли или рядом, или
(что ещё лучше) руками посадить самолёт, если он ещё летает над этой аварийной АПП.
Для активации режима Auto RTR:
● Выберите OSD экран с активным полем КГС(ILS).
● Выберите ВПП из OSD меню Runways->(выбранная ВПП)->Select
● Измените режим автопилота в режим AUTO (используя переключатель режимов
автопилота на радио аппаратуре).
● Переведите стик газа в нижнее положение (PPM пульс меньше 1250 микросекунд или
меньше ¼ стика газа).
Замечание: Этот режим автопилота по настройкам и положению стика газа такой же,
как и используется при Failsafe. Это позволяет использовать этот режим, когда
аппаратура управления выключена.
Figure 13 – Auto RTR mode with ILS field active
При активном режиме RTR изменение режима автопилота из AUTO в STAB или OFF позволит
выполнить ручную посадку при помощи КГС(ILS).
Ручная посадка с КГС(ИЛС)
Этот режим позволяет пилоту приземлиться на предопределённую ВПП, используя функцию
КГС(ILS) и выполнить безопасную посадку в темноту, туман или в случае поломки камеры.
Подход и посадка отображаются на экране OSD в соответствии с предварительно
сохраненными параметрами, такими как азимут и угол глиссады. Для полного описания
возможности КГС(ILS) обратитесь к документу “ILS_in_Pitlab_OSD”, доступному в формате
PDF на веб-сайте Pitlab. В этом режиме расстояние и курс отображаются относительно к GPS
точке начала ВПП.
Для активации ручного режима посадки по КГС(ILS):
● Выберите OSD экран с активным полем КГС(ILS).
● Выберите ВПП из OSD меню Runways->(выбранная ВПП)->Select
● Выбрать режим автопилота STAB или OFF (используя переключатель режимов
автопилота на радио аппаратуре).
Figure 14 – Ручная посадка по КГС(ILS)
Когда активен режим ручной посадки по КГС(ILS), изменение режима автопилота на AUTO
вызовет изменение режима навигации на RTR (Возврат на ВПП).
Авто посадка с КГС(ILS)
В режиме автоматической посадки автопилот выполняет полную процедуру посадки.
Автопилот летит к началу полосы, кружится, пытаясь достигнуть правильной высоты и угла
глиссады, затем следует по пути захода н апосадку, отключает мотор на низкой высоте и
садится на ВПП. Вся навигационная информация отображается на OSD (расстояние и курс)
относительно начала полосы, но изменяется на относительную к точке приземления при заходе
на начало полосы.
Для полного описания автоматической процедуры посадки обратитесь к документу “Automatic
landing in Pitlab FPV System”, доступному в формате PDF на сайте Pitlab.
Figure 15 – Авто посадка с КГС(ILS)
Для активации режима автоматической посадки:
● Выберите OSD экран с активным полем КГС(ILS).
● Выберите опцию посадки на выбранную полосу Runways->(выбранная ВПП)->Select
for auto landing.
● Переместите стик газа в нижнее положение (PPM пульс ниже 1250 микросекунд или
ниже ¼ стика газа).
Замечание: Когда автоматическая посадка активна, события RC failsafe и RC failure так
же вызовут автоматическую посадку. Это позволяет безопасно приземлиться на
удалённом аэродроме при отсутствии радио управления.
Маршрут
В ручном режиме полёта по маршруту система будет вести пилота (а в AUTO режиме
автопилот будет лететь самостоятельно) через предопределённый набор GPS точек по пути,
вроде полёта по путевым точкам, но маршруты более продвинутый режим, чем путевые точки.
Система позволяет определить и использовать до 10 маршрутов по 127 точек(вертексов) в
каждом. Дополнительно, маршрут отображается на OSD радаре как набор последовательных
линий , а не одиночных точек. В течении полёта, навигационная информация на OSD
(дистанция, курс) относительны следующему вертексу на маршруте.
Для полного описания Маршрутов, пожалуйста смотрите документ “Routes in PitlabAndZbig
FPV System” доступный в формате PDF на сайте Pitlab.
Figure 16 – Авто следование по маршруту
Для активации ручного полёта по маршруту:
● Выбрать режим автопилота STAB или OFF (используя переключатель режимов
автопилота на радио аппаратуре).
● Выберите маршрут через OSD меню Waypoints->Routes->(выбранный
маршрут)->From beginning или From nearest vertex.
Для активации автоматического полёта по маршруту:
● Выберите маршрут через OSD меню Waypoints->Routes->(выбранный
маршрут)->From beginning или From nearest vertex.
● Измените режим автопилота в режим AUTO (используя переключатель режимов
автопилота на радио аппаратуре).
● Переведите стик газа в среднее положение (PPM пульс между 1250 и 1750
микросекундами или между ¼ и ¾ стика газа).
Резюме по полётным режимам
Название
режима
Режим
автопилота
Стик
газа
Виджет
ILS
Выбрана
ВПП
Путевая
точка
Маршрут Расстояние и курс
(относительно чего)
Circle AUTO Up x x x x База
Hold AUTO Mid x x No No База
Waypoint AUTO Mid x x Selected No Путевая точка
Route AUTO Mid x x No Selected Вертекс
RTH AUTO Down No No x x База
RTR AUTO Down Yes Selected x x ВПП
Landing AUTO Down Yes Set for
auto
landing
x x Начало подхода к
ВПП
Base STAB,OFF x No x No No База
Runway STAB,OFF x Yes Selected No No ВПП
Waypoint STAB,OFF x x x Selected No Путевая точка
Route STAB,OFF x x x No Selected База
Take STAB,OFF x x x x x База
x – не важно
We wish you
Если удобно, можно в WhatsApp для этого не нужно меня записывать в телефон, просто нажимаете на ссылку и будите сразу мне писать: Написать в WhatsApp